Robot détecteur d'obstacle
Projet scolaire - Robotique et capteurs
🏆 2ème PLACE AU CONCOURS ROBOT GEII 🏆
Concours de robotique BUT 1 - GEII
Classement final : 2ème sur l'ensemble des participants
Contexte
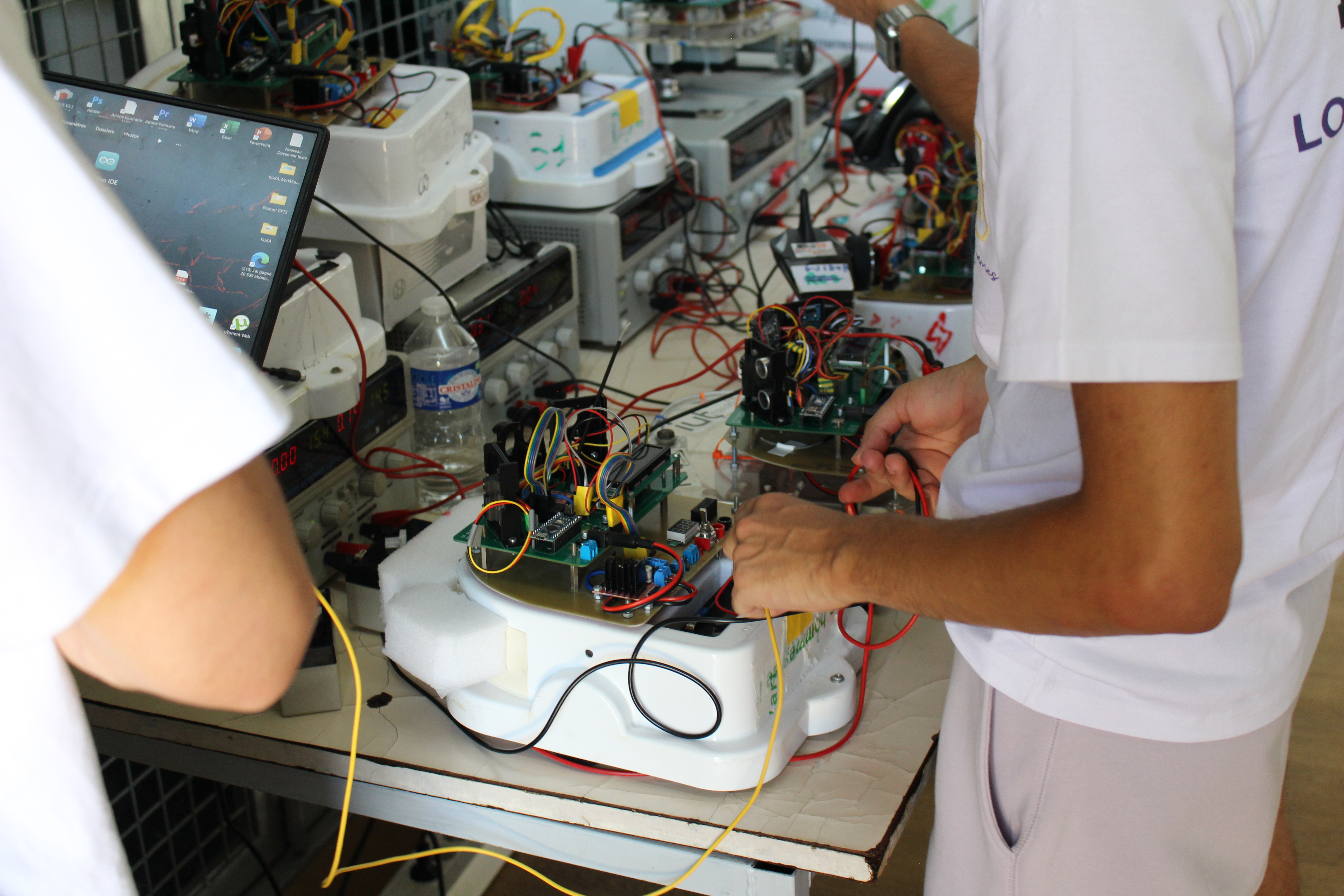
Ce projet consiste en la réalisation d'un robot autonome capable de détecter et d'éviter les obstacles. L'objectif était de développer un système robotique mobile intégrant des capteurs de proximité et un algorithme de navigation autonome.
Ce projet permet d'aborder les fondamentaux de la robotique mobile et de l'intelligence artificielle embarquée.
Manipulations et interventions effectuées
- Conception de la structure mécanique du robot
- Intégration de capteurs ultrasoniques et infrarouges
- Programmation de l'algorithme de détection et d'évitement
- Développement du système de locomotion et de direction
- Mise en œuvre de la boucle de contrôle en temps réel
- Tests et optimisation des trajectoires
Bilan du résultat obtenu
Le robot est capable de naviguer de manière autonome dans un environnement avec obstacles, en détectant et en évitant efficacement les objets sur sa trajectoire. L'algorithme développé permet une réactivité satisfaisante et des trajectoires cohérentes.
Les tests ont démontré la fiabilité du système dans diverses configurations d'obstacles.
Ce projet a été présenté lors du concours robot de GEII en BUT 1, où j'ai obtenu la 2ème place sur l'ensemble des participants. Cette reconnaissance valide la qualité du travail réalisé tant au niveau de la conception que de la réalisation technique. Le concours évaluait les performances du robot (vitesse, précision de détection, évitement efficace), la qualité de la conception et la présentation du projet.
Ressenti personnel
Ce que j'ai aimé
La robotique mobile est un domaine passionnant qui combine électronique, programmation et mécanique. J'ai particulièrement apprécié le défi de créer un système autonome capable de prendre des décisions en temps réel.
Difficultés rencontrées
La calibration des capteurs et la gestion des faux positifs ont représenté un défi important. Il a également fallu optimiser l'algorithme pour obtenir des trajectoires fluides tout en évitant les oscillations.
Lien avec mon projet professionnel
Ce projet m'a permis de développer des compétences en robotique et en systèmes embarqués temps réel, des domaines qui m'intéressent particulièrement pour une carrière dans l'automatisation industrielle ou la robotique de service.
Compétences Utilisées
Apprentissages Critiques mobilisés
Concevoir (Niveau 1)
- AC11.01 | Produire une analyse fonctionnelle d'un système simple
- AC11.02 | Réaliser un prototype pour des solutions techniques matériel et/ou logiciel